Today, the once distant vision of the fully autonomous car is inches away from reality. First driverless cars are roaming the streets in test condition, and ride-hailing giants are resuming their self-driving operations on public roads. And while we are yet to see the large-scale commercial deployment of Level 4 and Level 5 autonomous vehicles, highly automated and robotic systems have become commonplace in the luxury car segment, paving the way for fully automated capabilities thanks to HD mapping for autonomous vehicles.
The widespread adoption and price erosion of Advanced Driving Automation Systems (ADAS) as comprehensive driving assistance bring us significantly closer to the realization of self-driving cars. Nevertheless, ADAS alone isn’t sufficient to make autonomous cars a reality. To tackle one of the biggest challenges of autonomous driving — the ability to determine the exact position of a vehicle in real time — another critical enabler is required: high-definition mapping (HD mapping). Today, we’ll address the most common questions and challenges related to HD maps for autonomous driving.
- High-definition maps: Mapping the route to autonomous driving
- What are HD maps for autonomous vehicles?
- How does HD mapping impact the realization of self-driving cars?
- The vital challenges of high-precision HD mapping for autonomous vehicles
- Enhancing navigation data interoperability through NDS
- What are Navigation Data Standards?
High-definition maps: Mapping the route to autonomous driving
What are HD maps for autonomous driving?
As the action of driving gradually transfers from humans to machines, the role and scope of digital maps extends beyond navigation. GPS solutions cannot keep up with driverless cars, as they don’t provide data that’s dynamic and accurate enough for driverless vehicles. Autonomous driving software requires self-healing mapping autonomous vehicles systems explicitly built for self-driving cars to extend their vision and provide a detailed inventory of road features and objects on the side of the road.
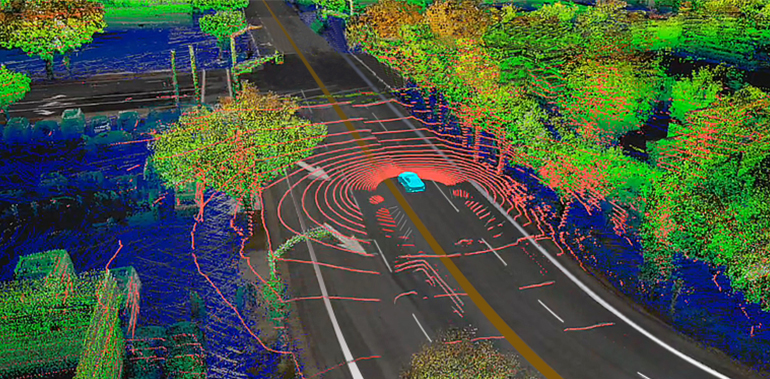
The HD maps for autonomous driving allow a driverless vehicle to localize itself with high precision, mapping its exact location with respect to the surrounding environment. As opposed to ‘traditional’ maps, HD maps for self-driving cars are not intended for general navigation. HD maps for autonomous driving integrate and analyze sets of data from multiple sources, such as vehicle sensors, LiDAR, onboard cameras, satellite imagery, and GPS in real time.
The fusion of car big data reflects the exact position of the car in relation to all landmarks, supplying comprehensive, up-to-the-second information about road gradients and boundaries, traffic signaling, lane placement, anticipated curves, and safety conditions. As a result, high-definition maps deliver a faithful representation of the road with laser-sharp precision, setting a new standard for in-car navigation systems of autonomous vehicles.
How does HD mapping impact the realization of self-driving cars?
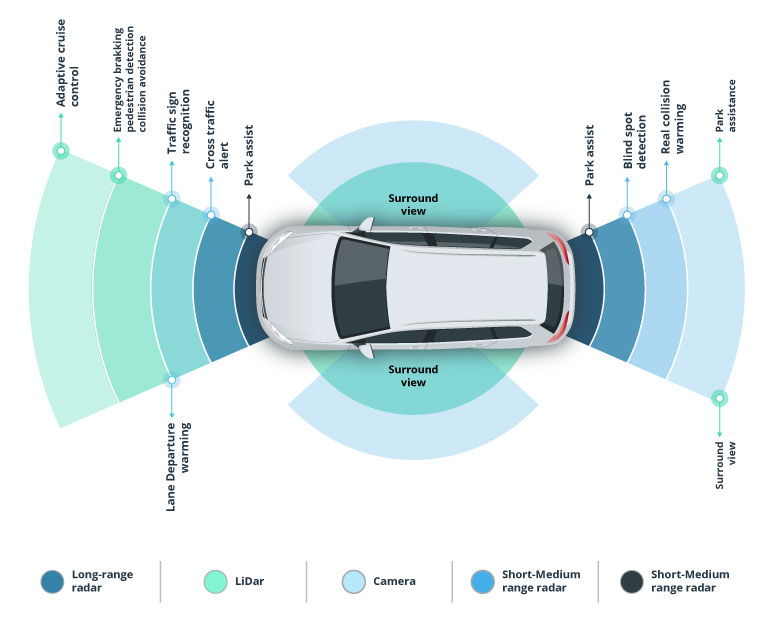
High-precision maps increase reaction speed of AD systems already in place, which makes them a prerequisite for safe driving automation. By providing a 360-degree view of the road and driving conditions, HD maps for autonomous driving allow self-driving vehicles to make instant decisions about driving strategy much faster than a human driver could. They improve sensor perception in extreme weather conditions or at a very close range (down to 10 cm), and are able to recognize objects and events that might otherwise go unnoticed by intelligent onboard sensors.
However, the ultimate goal of intelligent driving is to mimic the capabilities of a human driver, not only by ensuring safety but also by adding to passenger comfort. HD maps for self-driving cars also help achieve that. Apart from their ability to dynamically map route conditions, advanced mapping autonomous vehicles systems aid self-driving cars with smooth path planning, allowing them to anticipate the road ahead and delivering superior passenger experience.
Why autonomous vehicles require HD maps?
HD maps are a fundamental part of autonomous driving infrastructure. Like engine-driven cars rely on fuel and gas stations to operate in scale, self-driving cars require HD maps enriched with recent data to achieve lane-level navigation accuracy. Unlike human drivers, autonomous vehicles can’t adapt to map inaccuracies.
When the usual map is turned off, the driver can see the environment just by looking through the windshield. The autonomous vehicle works differently than this, even equipped with cameras and sensors, as it still needs the source of operatable data. HD maps for autonomous driving provide inch-perfect accuracy, detailing pedestrian crossings, traffic signals, and barriers.
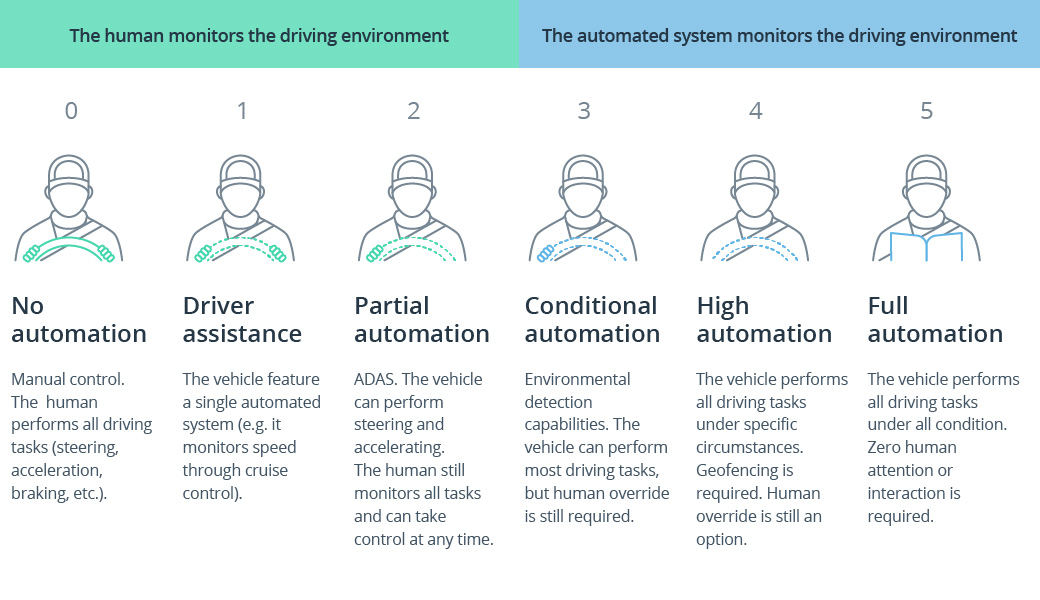
In recent years, OEMs have recognized that any self-driving system above Autonomy Level 2 requires onboard HD maps. Real-time computing and onboard sensors alone can’t handle the complexity of roads and traffic. In such a way, HD maps become critical for the guidance of autonomous cars. As early versions of Tesla Full Self-Driving demonstrate, HD maps are not a luxury component but a necessity for safe and reliable automated driving.
The vital challenges of high-precision HD mapping for autonomous vehicles
Although high definition map technology has made great strides in facilitating car self-localization and its implications are far-reaching, it still has some pitfalls that need to be addressed.
Large pools of data
HD maps for self-driving cars relies on compiling information from LiDAR scans, mobile cameras, connected sensors, and GPS devices, and updates it with crowdsourced inputs from commercial fleet partners. The captured data is collected into immense volumes, which must be instantaneously processed to produce immediate output. This imposes a burden on computing power. The fastest and most reliable way to resolve that issue is through comprehensive, cloud-based navigation platforms, which integrate map collection, aggregation and maintenance features. Based in the cloud, these features provide enough storage and high-performance computing power capabilities to support the demanding autonomous driving infrastructures.
Issues in HD mapping for autonomous vehicles
Unfortunately, some HD map data challenges remain unresolved. Geospatial data often comes in commercial or proprietary formats, and automobile companies and OEMs may lack the resources and technologies to collect it in its native format without quality loss. On top of that, each country has its own set of policies governing collecting, safeguarding, and disseminating spatial information. Many governments are yet to work on advancing their geospatial data activities. Until then, the sharing of geospatial data remains hindered in many cases.
Real-time data streaming issues
Speed is a crucial consideration in the pursuit of safety-critical driving automation. To deliver accuracy beyond conventional GPS solutions, high-definition navigation must bridge the gap between dynamic road changes and the time they appear on the map. Over-the-air updates of car positioning and road conditions require high-speed bandwidth and support for high vehicle density. The existing V2X networking and connectivity capabilities don’t provide these. Transmission allocation and cache allocation improvements are being made to reduce delays in HD map delivery, but latency remains an issue. However, 5G technology is anticipated to provide the resolution, offering transmission speeds of 5Gbps and latency below 10ms.
High costs of autonomous vehicle HD mapping
The difficulty in compiling high-precision maps HD within a reasonable budget is a common problem for mapmakers and autonomous vehicle mapping manufacturers. Factors related to the persistently high costs of 3D mapping solutions are varied, but machine power and labor are some of the main culprits. Automotive companies, OEMs, and mapmakers strive to reduce expenditures in a way that doesn’t compromise technology quality at the expense of end product affordability. To accelerate their automotive breakthrough for driverless vehicles and reduce outlays, these companies are partnering with software engineering companies and working toward standardization.
Lack of common standards
The lack of a single automotive-grade navigation base is one of the crucial obstacles to the full commercial readiness and safety of self-driving cars. Individual smart car manufacturers, as well as navigation technology companies such as TomTom, HERE Maps or Nvidia, are publishing their own maps in proprietary formats; however, the real value of HD mapping for autonomous vehicles can only be realized through standardization. Without it, map integrity and reliability are much more difficult to achieve. In fact, the NDS (Navigation Data Standards) Association was founded in recognition of the need for consistent data specification for HD mapping.
Scaling HD maps using computer vision technology

Scaling HD mapping for autonomous vehicles brings computer vision upfront as an essential tool. For example, Tesla relies on stereo vision to perceive surroundings, collecting high-resolution 3D images surpassing the capabilities of many other sensors.
While mainstream vehicle ADAS functions may not immediately require real-time HD map updates, the question of receiving up-to-date data for the map stays. The usual way to collect data for HD map updates is to use survey fleets, which could cost a lot of money. So, to lower these costs, OEMs could simplify the surveying process to the point where it’s accessible to non-specialists but casual drivers.
Creating vehicle-agnostic, user-friendly equipment makes it possible to engage part-time drivers and their private vehicles, like drivers of Bolt or Uber. Anyone with a driver’s license can become a survey driver, equipped with cost-effective, self-contained hardware that transforms any car into a survey vehicle for collecting HD map data. This innovative approach enables automakers to meet their map update demands cost-effectively, aligning with automotive pricing requirements.
Enhancing navigation data interoperability through NDS
What are Navigation Data Standards?
The NDS Association aims to create a global standard for in-vehicle navigation, ADAS, and e-horizon safety systems. The organization unites automotive OEMs, map data providers, and navigation device/application providers in a joint effort to build a single, integrated location reference that would ensure the integrity and reliability of HD maps for self-driving cars. Together, these automotive leaders are working toward a definition of a streamlined, globally adopted standard specification for a common method of storing and updating HD map data in a format that ensures easy access and interoperability and allows for seamless updates.
What is the value of NDS HD maps for autonomous driving platforms?
NDS navigation leverages mapping databases, which cover a dedicated geographical region and are maintained by a single supplier. The data within every base is organized into building blocks, each representing a particular functional aspect of navigation and layered with interconnected references. Since NDS maps work globally, they can be easily adapted to comply with country-specific regulations.
As a collaboration-based resource, NDS helps reduce the time and cost of developing a high-precision navigation system. It pools data from a global network of members, which means faster and easier map compilation. By compiling NDS-compliant HD maps, all stakeholders can redress the compatibility issues of trying to translate and interpret data gathered in non-compatible formats from disparate sources. Through data compatibility, the standard promises to speed up the feedback loop for immediate data updates in the autonomous driving map. A common framework for HD mapping also prevents vehicles from sharing data indiscriminately and sourcing it from unverified resources. In this way, it increases data quality and consequently enhances driving safety and experience.
Elevating HD maps to series production
Three distinctive phases define the future of HD maps in autonomous driving.
Create
The initial phase involves creating the first versions of global HD maps, covering major highways across the USA, Europe, and Japan. This global coverage is a basic requirement for maps series production, with most contracts expected to be realized in the next one to two years.
Maintain
The second phase focuses on keeping these initial HD maps for self-driving cars up to date, employing HD-grade survey equipment and processing tools but with lower costs and faster turnaround times (around two weeks from detecting changes). This approach is based on existing HD mapping technology and will remain relevant for several years.
Scale
The last phase involves designing and implementing an end-to-end solution for harvesting onboard sensor data from production vehicles, aggregating and processing it to detect changes in the already mapped environment, and updating the HD map in real-time for the entire fleet. This phase represents the future perspective of HD mapping in this decade and will require much more time to develop.
As we talk about the leaders in this scaling race, Mobileye could leap directly to phase three. And the competitive nature of the automotive industry suggests that others will catch up. OEMs and Tier 1s will have the opportunity to establish their competing offers while benefiting from the step-by-step strategy offered by this three-phase model.
The future landscape of HD mapping for autonomous vehicles will offer different philosophies. We saw the same during the early competition between Apple and Microsoft, where one favored a closed, end-to-end system for high performance, and the other advocated for a more open ecosystem. In this open ecosystem, various companies, including automakers, sensor manufacturers, software specialists, mapping firms, and telecommunications companies, will collaborate, bringing their unique expertise.
Comparison of HD mapping services providers
HERE Technologies:
Expertise: HERE Technologies is a leading provider of mapping and location-based services, known for its extensive experience and accuracy in mapping.
HD Mapping: HERE has invested significantly in HD mapping technology, offering highly detailed and precise maps for autonomous driving applications.
Partnerships: The company collaborates with automakers, technology providers, and government agencies to provide mapping solutions for autonomous vehicles.
Real-Time Data: HERE provides real-time traffic and road data crucial for navigation and self-driving cars.
Global Reach: HERE has a global presence and offers maps covering a wide range of regions worldwide.
Google Maps:
User Base: Google Maps boasts a vast user base, making it one of the most widely used mapping platforms globally.
Data Integration: Google Maps leverages its wealth of data from user-generated content and Street View imagery to improve map accuracy.
Integration with Other Services: It seamlessly integrates with other Google services and is commonly used for location-based applications.
HD Mapping Initiatives: Google has invested in HD mapping for autonomous vehicles, although it has yet to be the primary focus.
Ecosystem: Google Maps is part of a broader ecosystem, including Android Auto and Google Assistant, which can enhance the driving experience.
NVIDIA:
AI and Hardware Expertise: NVIDIA is known for its expertise in AI and hardware, which applies to HD mapping and autonomous driving.
Drive Platform: NVIDIA’s DRIVE platform offers a comprehensive solution for autonomous vehicles, covering hardware and software.
Deep Learning: NVIDIA employs deep learning and computer vision technologies to enhance mapping and perception.
Partnerships: The company collaborates with automakers and tech companies to integrate its technology into self-driving cars.
Simulations: NVIDIA uses advanced simulations to train AI models, contributing to improved HD maps.
Each of these providers brings unique strengths and focuses to the table. HERE Technologies is a well-established mapping giant with extensive HD mapping capabilities. Google provides navigation to a broad user base and has diversified its portfolio with HD mapping initiatives. With its AI and hardware expertise, NVIDIA offers a comprehensive solution for autonomous vehicles, focusing on perception and mapping. The choice of provider depends on specific needs, partnerships, and the level of integration required in autonomous driving systems.
Joining forces to enable full driving autonomy
A widespread rollout of autonomous driving is tantalizingly close, and HD mapping for autonomous vehicles is among key contributors to its realization. However, the technology still has some challenges to tackle. Seeking to resolve them, advanced navigation companies such as TomTom, Nvidia, and HERE Maps HD are coming together and forging strategic alliances with specialty IT vendors like Intellias. Through collaboration, their aim is to alleviate cost burdens and accelerate market entry for their high-precision mapping solutions.
As a trusted software development company, Intellias has expertise in building 3D maps, maps HD, and NDS-based navigation for autonomous driving. We’re delivering impressive autonomous driving map projects and taking charge of the full life cycle of 3D HD maps, from eliciting source data to creating and publishing the maps. Contact us to discuss your project requirements with one of our automotive engineers.



